https://arxiv.org/abs/2409.06662
World-Grounded Human Motion Recovery via Gravity-View Coordinates
We present a novel method for recovering world-grounded human motion from monocular video. The main challenge lies in the ambiguity of defining the world coordinate system, which varies between sequences. Previous approaches attempt to alleviate this issue
arxiv.org
1. 간단한 요약 및 소개
Title: World-Grounded Human Motion Recovery via Gravity-View Coordinates
이 논문은 단일 영상으로부터 중력과 시점에 정렬된 세계 좌표계에서 3D 인간 동작을 재구성하는 새로운 방법을 제안합니다. 기존의 카메라 중심 좌표계 기반 방식의 한계를 극복하기 위해 중력-뷰(Gravity-View) 좌표계를 활용하며, 이는 인공지능과 로봇 학습 등 다양한 응용 분야에서의 동작 재구성에 혁신적인 접근법을 제공합니다.
2. 기존 문제점
- 기존 카메라 중심의 인간 동작 재구성 방식은 카메라 이동 시 물리적으로 부자연스러운 결과를 초래.
- 기존의 세계 좌표계 기반 방법은 누적 오차(accumulated error) 문제로 인해 장기적인 모션 재구성이 어려움.
- 세계 좌표계를 정의하는 데 있어 회전의 자유도 문제가 존재하며, 이는 데이터 학습 과정에서 불확실성을 증가시킴.
3. 해결법
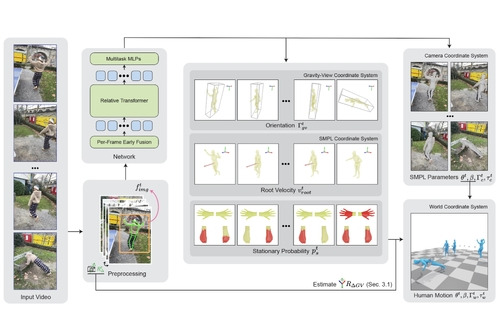
- 중력-뷰(Gravity-View) 좌표계 도입: 중력 방향과 카메라 뷰 방향을 기준으로 고유한 좌표계를 정의하여, 프레임별 동작을 세계 좌표계로 변환.
- Transformer 기반 네트워크: RoPE(Rotary Positional Embedding)를 활용하여 시간적 상관관계를 효율적으로 학습.
- 에러 누적 방지: 각 프레임의 동작을 독립적으로 예측하고, 카메라 회전을 통해 세계 좌표계로 일관성 있게 변환.
4. 기여
- 새로운 좌표계 설계: 중력-뷰 좌표계를 통해 누적 오차를 줄이고 중력 방향에 자연스럽게 정렬된 동작 생성.
- 효율적인 네트워크 설계: Transformer와 RoPE를 조합하여 긴 시퀀스에서도 강력한 일반화 성능 발휘.
- 종합적인 성능 향상: 카메라 공간 및 세계 공간에서 기존 방식보다 정확하고 자연스러운 동작 재구성을 입증.
- 응용 가능성: 이 기술은 VR/AR, 로봇 학습, 동작 분석 등 다양한 분야에 활용 가능.
5. 한계 및 개인적 생각
- 계산 비용: Transformer 기반 설계로 인해 학습 및 추론 과정에서 높은 GPU 자원 요구.
- 데이터셋 한계: 정적 배경 데이터에 의존하여 동적 배경에서의 성능 저하 가능성.
- 세부 동작 모델링: 작은 구조(예: 손, 발)의 세부 묘사에서 제한적인 표현력을 보임.
- 추가적 발전 방향: 다양한 데이터셋 통합과 동적 배경을 포함한 확장 연구 필요.



